This month was our second Makerfaire in Roma since I started the
InMoov project. We got there just in time with the airplane to get ready
with the robot for the next day opening. No problems with customs.
We were set along with the French Makerfaire team, Barbot, Bertier Luyt and Jean-Baptiste and 3DprinterX tattoo Machine.
. Alessandro Didonna was already on the set with his girlfriend, along with Bram Geenen of Wevolver.
The location we had was perfect, a huge place with a lot of people
passing through, not too much noise, which is good when you talk to the
robots.
As planned, there was also Leon and Marten,
that had a booth. Unfortunatly they were far away from us, and we only
saw each at the end of the days when it was time for Pizza!!!
They
had brought their DIY Gimbal camera stand, a very well made Submarine
(1m20) and the second version of the InMoov Nervo boards all ready and
soldered to be mounted on the Arduino boards. Alessandro also got a kit.
They offered me for my birthday an extra Arduino Mega board!!! Thanks
guys!
I bet when the builders are going to see those picture, they
are going to ask when are they going to be for sale... Sorry for the
delays, but I'm not the only one in the loop on this. :)
Four days of geekiness with Makers from all over Europe! It all went very smooth, no problems with the flights and InMoov arrived safely. No broken jaw or shoulder. It was pretty intensive, but what a great time. I meet Leonardo (who's made this website) and Alessandro (Ambassador of MyRobotLab), and we shared some unforgetable moments.
Wow this is it! Tomorrow we are going to Roma to present Inmoov at the Europeen Makerfaire. I'm pretty excited, hopefully everything will go smoothly, starting with douanes and the airports.
3D printing is a major concern for the authorities since some fools printed guns, now any printed stuff can be potentially a weapon. Since you could print a Makerbot rabbit that works as a gun, who knows what form a gun could take. Anyway, I really wonder how this is going to be evaluated by the "douanes".
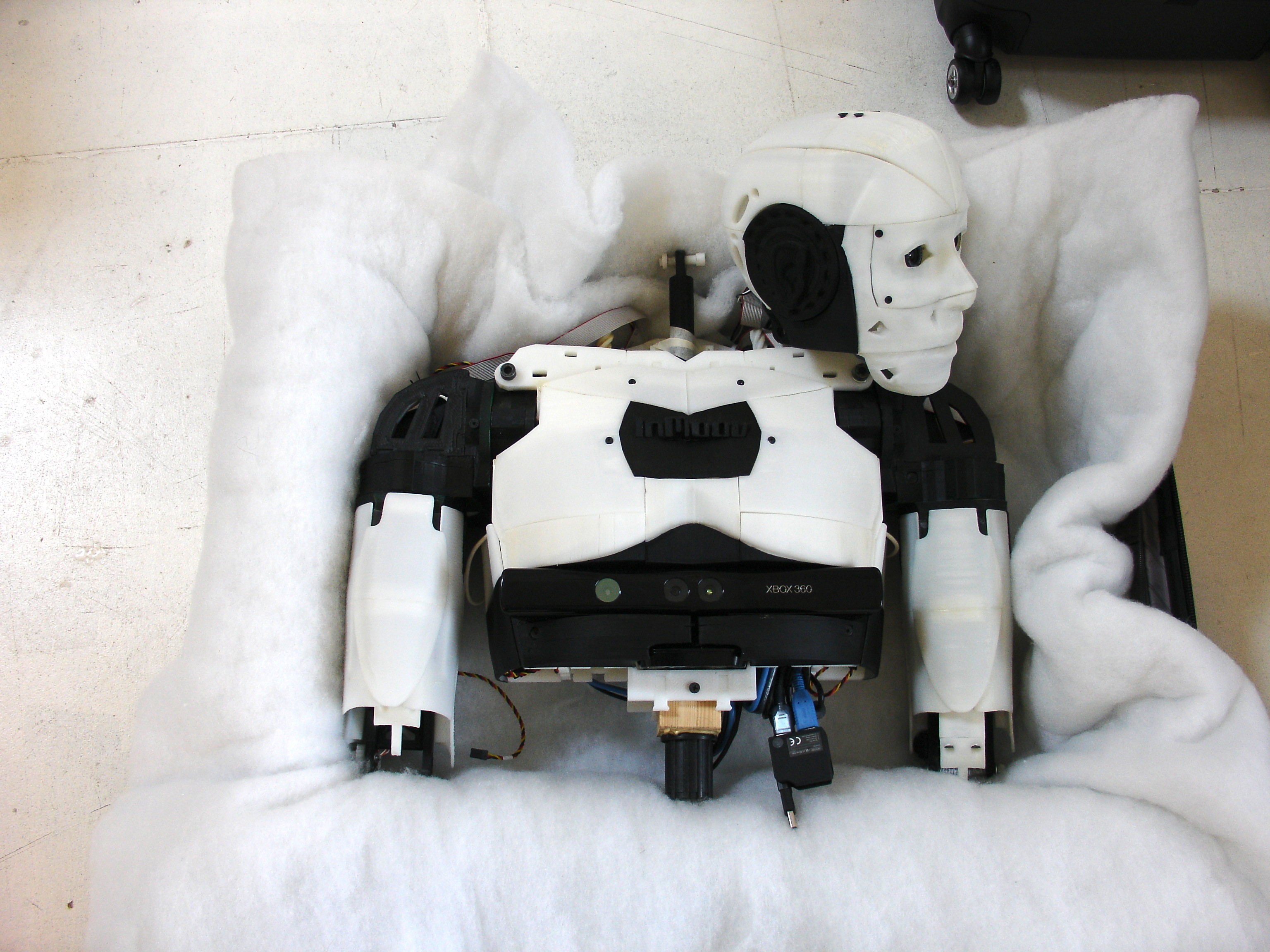
As you know Inmoov is filled with cables, motors and batteries.
Hopefully when they open my suitcase they will see a robot and not something else. How does this looks to you?
I was away for a while, and of course when I travel, I don't cary my 3D printer with me. Plus, being away in the desert makes it difficult to comuunicate with internet. Since I released the finger prosthetic for Bionico, I was impatient to print it. Fortunatly Morris, on the other side of the Atlantic had his printer ready for testing. He was the first one to print the finger and got me some feedback. You can see his blog here So I was designing on my computer in the desert and he was printing the parts along, and everytime some thing was not correct in my design, he would notify me and I could check the pictures posted on his blog to modify the design in consequences. This took us a lot of time after all. But we got to move on and thanks a lot to him. The three bellow pictures are from his blog:
Being back from the desert, I was then able to print the finger. There was still things that were not correct. I also ordered another type of motor which is a 6V planetary gear motor with a ration of 154:1 from Pololu. So the casing had to be redesigned again. There is a very small worm gear that actuate the finger and I printed it in ABS but it is definitly too fragile, so it either needs to be modified or printed in stainless steel. You can get it by Shapeways here.
I left both versions on Thingiverse because it can be handy for other projects.
With the servo Corona DS238HV use these files:
-FingerWormV1.stl
-ServoHolderV2.stl
-PhalangeV6.stl
-ActuatorsV3.stl With the planetary gear motor use these files:
-FingerWormV2.stl
-MotorHolderV3mid.stl
-MotorHolderV3top.stl
-PhalangeV6.stl
-ActuatorsV3.stl
It was pretty hard to make that video, because the small wormgear breaks when the finger reach the end of it's run. Unfortunatly I haven't yet figured out how to set a time delay on my script and a reverse of polarity. Using DC motors and servos is not the same when it comes to create a script in the Arduino. The big news:
InMoov is selected and invited for the European Makerfaire Edition in Roma. So I will be going to Italy and have the pleasure to meet all the italian and european geeks that attend this event. I hope to get some time to make the robot usable, it's going to be something to put the full InMoov in a suitcase. Myrobotlab is also selected to attend the Makerfaire, Alessandro will be the Ambassador of MRL. Leonardo who has created a superheroe InMoov will attend the faire as well, hopefully his suitcase is big enough for to bring his robot. Leonardo his also working to make us a real website. And Bionico, of course, is also selected for the Makerfaire, we are currently getting a hand ready for Nicolas. Hugues is hard at work on all the stage levels. Here is a french article about us in LE MONDE newspaper.
Mmmh, Since InMoov hand has been released on Thingiverse in 2012, I received demands on
how to use it as a prosthetic. I was always a bit skeptical about it. I knew the initial design was not
really adapted for that matter and I think it could be better done if I kept
the prosthetic perspective in mind. Lately a french FabLab of Rennes asked me if they
could use InMoov for their project. So, I have been working on this for about three full days. I had made a first design very simple to see if it could actually work. I presented it in Rennes for the Bionico project. The idea is to get a finger that gets actuated mechanically instead of using braid lines to pull the fingers.
It may look similar, but I tell you, it isn't. This little baby really took me a hell of a time to design. When things are small, you need to take a lot in consideration with our 3D printers. First, all parts should be printable without or almost without support, the thickness of the walls have to be thick enough to be printed with a reasonable definition. Parts should be easy to assemble. And last, parts shouldn't require too much quality from our printers...
I know this is not the legs... Many of you are waiting to see what's next to download for your robot. But this is important, if it can help disabled people, it is urgent. You can download this prototype here. Remember this hasn't been printed yet and may have problems that I still need to resolve. It is uploaded for the FabLab of Rennes to check movements and frictions under Freecad. This could, if it has enough strength under load, replace the hands of InMoov later on. It is meant to work with a Corona DS238HV servo. Also Leonardo and I have been setting up a website for InMoov, it isn't ready yet, but things are coming. Leonardo has been working hard on it, and I have been asking for to modify things, so poor Leonardo is under load. Also I want to thanks the donators, for their generosity. It will help us to keep the site up. Jha has made a new script for mouth movement and Grog has been working to add it in the InMoov service. I still need to test that to see how that works, but if it's good, InMoov should be able to move his jaw everytime he says something. Cool! The legs... That's what I'm going to focuse on now. Remember I had made the foot. This foot needs work and I need to redesign the ankle because I want to add a servo to get more DOF. So that's the next goal. I have worked on the Knee but it is not clear yet how I want to actuate it. So much work for so little time.
Rennes, was the city of my
grandparents. It was a long time since I wanted to go and visit this city, but somehow never got the occasion. It is definitly a city worth more than a two days visit. I found it very charming, these little streets become very full of life. On sunday morning it is very quiet and empty.
A few weeks ago I was contacted by a
Nicolas Huchet, Bionico who was interested in developing a prosthetic hand
based on InMoov.
I had been already asked for a few other projects of
this sort, but was a bit reluctant to go along. The main reason is
because InMoov isn't conceived to be such device and could be a disappointment instead of something really helpful. It's all plastic,
even if ABS can be used in many devices, once 3d printed it isn't has
resistant as when it is injected. Also depending on how the hand is built and printed, the final product can be good or a bad.
I did explain most of my reluctance to him, but still he was ready to go on with the project.
Following this I got contacted by
the LabFab of Rennes. As you maybe saw on youtube there is a InMoov
builder, called Brancante, who's been very involved into testing a
prosthetic with InMoov.
Putting them in contact was a logic
thing, and of course they shared their different results.
Region Bretagne organized this week-end
a big event pretty much like a MakerFaire. Imagine, Construis. Since
Nicolas Huchet was going to present his Open Source prosthetic
project during this event, Hugues du FabLab invited me to join them
for two days to present and work with them.
It was very interesting, I got to meet
a lot of people, some part of the projectand some others just
discovering it. During the event I did my first Round table based on
the OpenHardware subject in company of Nicolas Huchet. Other guests
were there, SnootLab, Mutable, John Lejeune, Jimmy P Rodgers.
Being most of the time a bear in it's
cave this was an interesting shot. Talking in a microphone to an
assembly of people is something. I guess with practice it becomes
easier with time.
Hughes had been, during the previous
days, working on a first prototype which was a real DIY hand with
cables and wires. I think somehow it made it even more interesting to
people because of it's intriguing appearance. Anyway the prosthetic was wired
with myo electric sensors, and we got to test it on Nicolas. And it
worked !
Of course the open close pattern
movement was very simple and was working with a bit of latency.
Nylon threads used by Hugues were
streatchable and thin, which didn't allow any grabing of things, but
think of it. The InMoov hand was printed in a few hours, then servos
were added with cables and then all wired to the Arduino with sensors
and that's it.
I think if we work and develloppe the
concept and design we can get a working Open source devise pretty
fast, and transformable to particular needs. Don't misunderstand me,
it's not going to be as good as the ILimb, but it can be very
helpfull for those who can't afford to pay 25 000 euros for a
prosthetic. The Makerfaire Tour bus was in Rennes for the occasion, they did an interview about the project.
Since the Nederlands I hadn't posted
anything on my blog, because of a lack of time, but there has been a
lot of things going on around InMoov though.
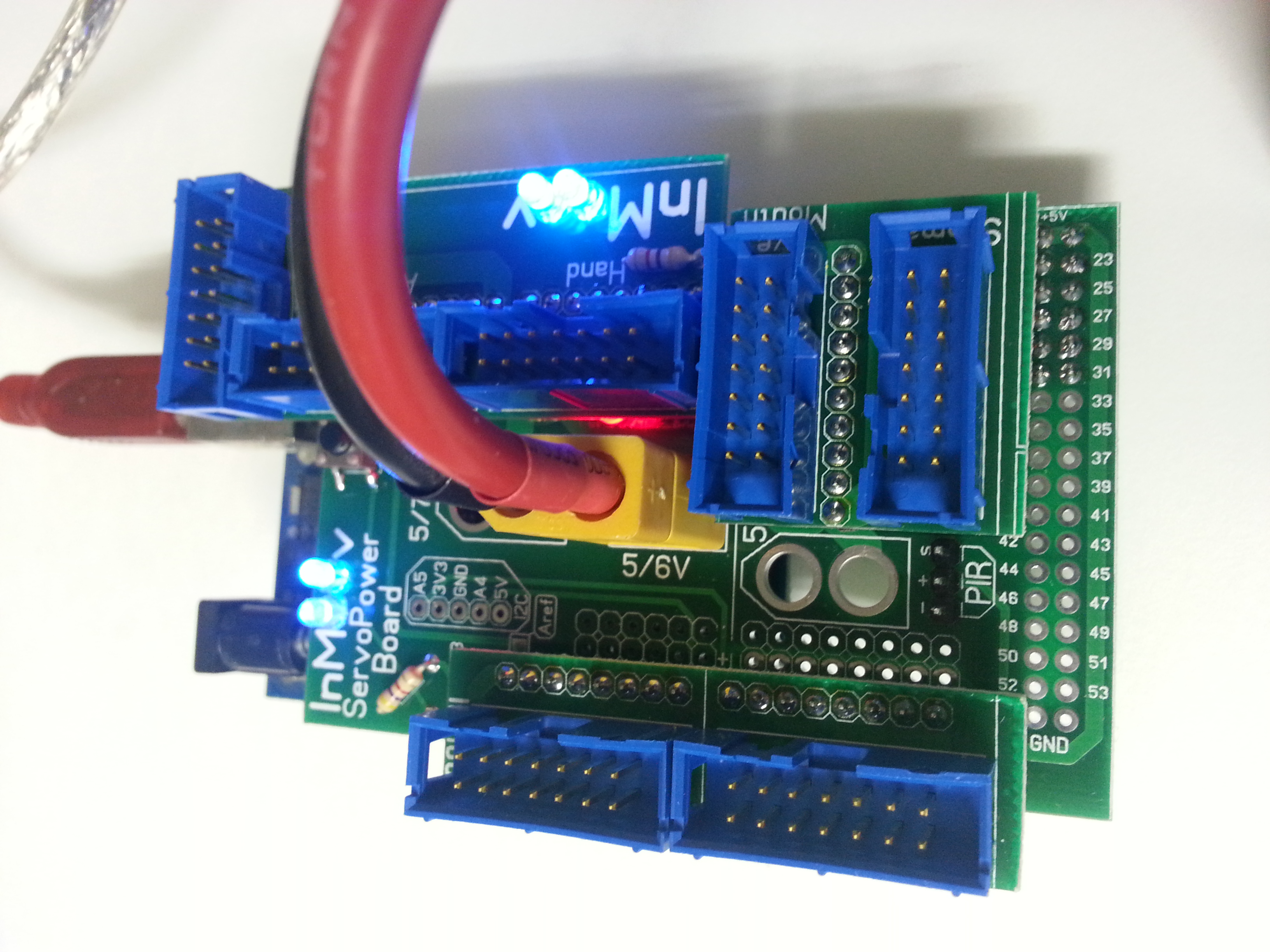
The major one, is the implementation of
the i2C board in MyrobotLab by Grog. This is a major advancement
because now I can hook up 16 extra servos per i2C board added to the
Arduino.
So that means the eyes servos but also
the jaw, and next the dorsale, hips, legs, feet.
It has been a 100% worky on the first
test, Grog couldn't believe it
Then another test we did with Grog and
Alessandruino was to test remote controlling the robot through the
internet. Imagine this, Grog being in the US took control of the
InMoov gestures in my workshop in Paris France. Totally amazing to
see !!
We tried the same thing wth
Alessandruino but somehow it didn't work. I think we had too many
video instances working at the same time.
Next innovation, Jha in Australia has
been working on a script to make the jaw work as the robot speaks.
That's also cool ! Just uploading the python script into MRL and
the robots could repeat the prewrote sentence and having is jaw
working in accordance. It isn't perfect if you really focuse on the
jaw, but once you get other body movements at the same time it is
interesting. Some might see this as a bit uncanney. The script is
available on MRL and I will make it available on the download tab.
Another new and interesting happening
is, Leonardo from Italy who has been printing a super heroe InMoov :)
He has proposed to work on the transfer of the blog data to a real
site, so for that matter I bought the domain name: InMoov.fr Thanks to donators we will be able to host the site and create something more conventional for us.