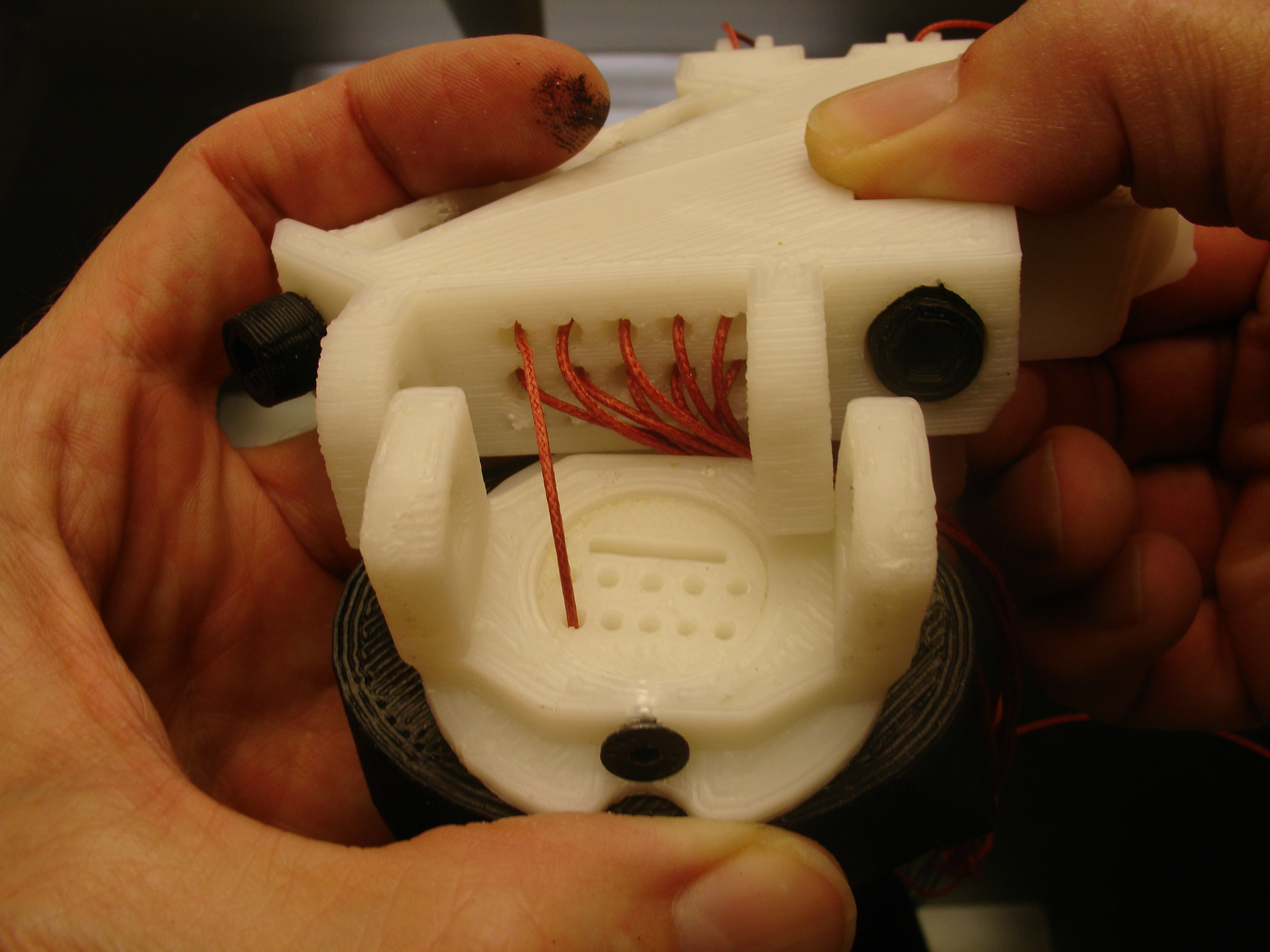
I have modified quite a few things on the hand,
and so I had to print it all over again with a new forarm. What is very
different, is the lining which is much, much more easy than before.
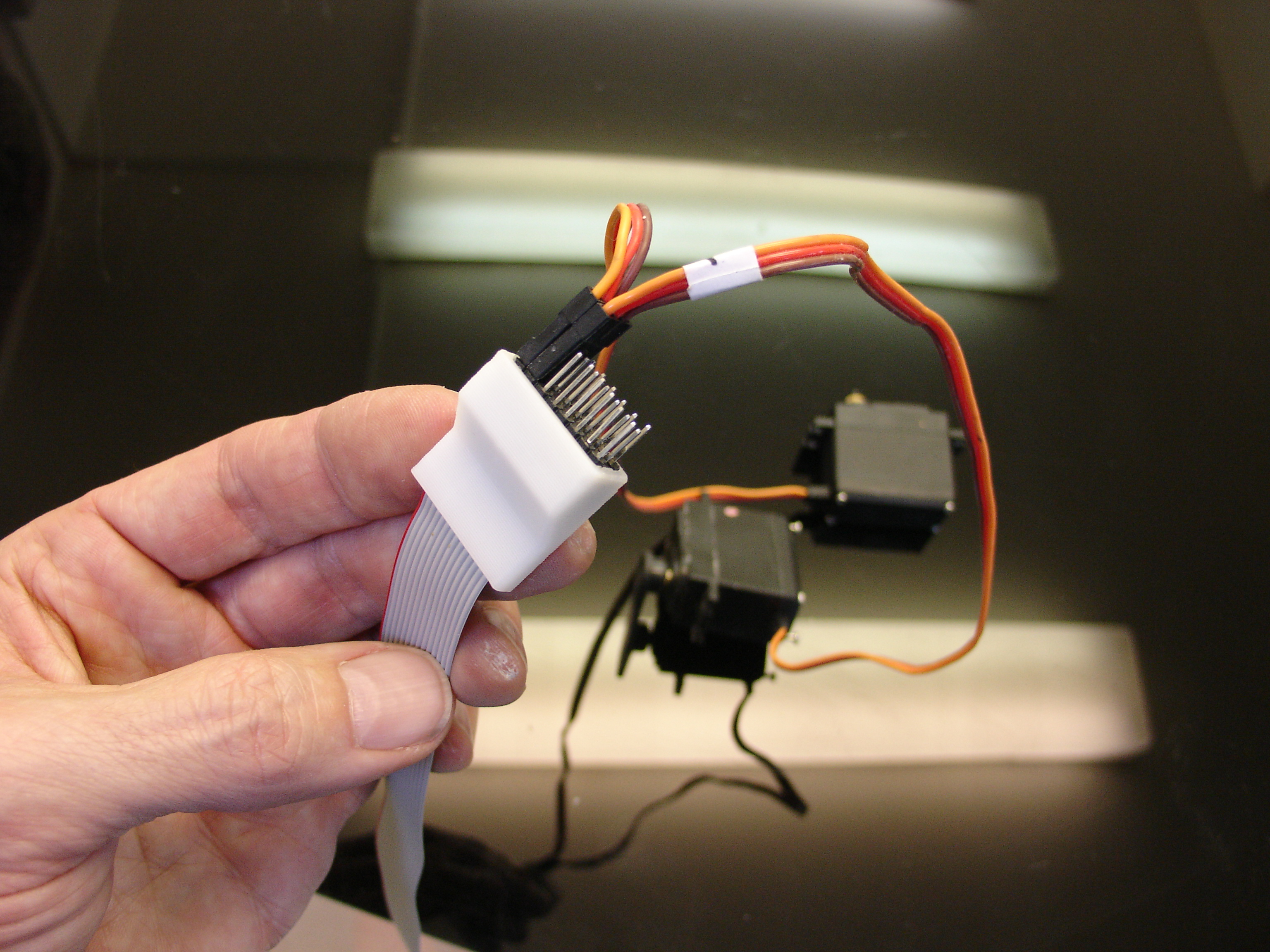
How many times was I asked about the connections I made from the servos to the Arduino… I decided to upload once and for all the way I did it, even if it is not very contionnal.
You will find the instructions in the Assembly/Other Tutorials tab under: Creating the connectors
I'm going to post this as is, I'm running out of
time and there is too much things going on. If I don't keep up I feel
like I will be submerged. So, this post is not really arranged but at least it's posted. Funny how french people made me talk! In Roma, I barely had to speak and would operate the robot almost the whole day long. In London I had to talk a lot to explain the project and I would operate the robot as well. In Paris, I just talked and explain everything over and over and barely could operate the robot. At the end of the day we were washed out! The
french would approach us with caution, but once they understood we were
not selling anything, the barrier was down and they were very, very
enthusiast. We got good contacts and there is good chance it will bring
more involvement in the near future. We tried to make pictures but
somehow the light with our camera was all dark and yellow, very
disappointing, there wasn't any natural light in the show room. So I
will only post others videos and pictures here. Here is a video
done by Russian people in visit in Paris, I feel like I gave the ball to
the robot a thousand times, during these shows, it is time he learns
other tricks and stuff. :)