Today is the releasing day of the bicep, and the beginning of the shoulder.
Gee, since the last post I had again to redesign SO many parts it is unbelievable. First the shoulder isn't going to be like I thought because I encountered some direction problems, it didn't look human anymore...
It was freaky! the shoulder was huge and too high which made InMoov like he had arms way too long.
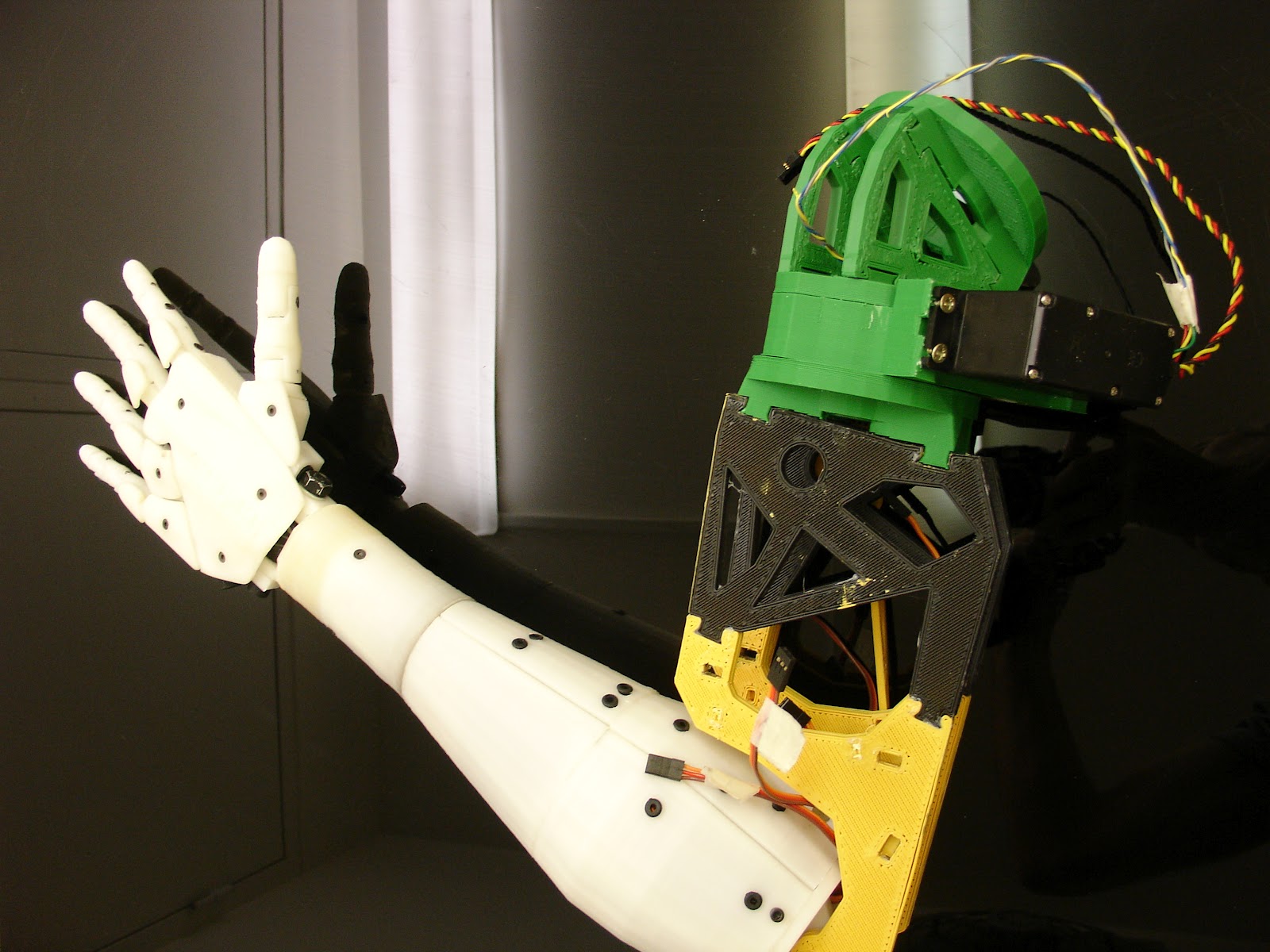
Some pictures of the bicep, I have done many pictures of the whole building process, to make it easy to build. Actually it will be easier for you guys to build the bicep then the forarm.
I'm planning on making a step by step with pictures, just that, it's so much work.
Covers aren't ready yet, I am still working on the design, after all this is what gives the final look. The one you see on the pictures are just for show off, but it should be something close.
Hope you enjoy it, because I do. When I see that arm moving by itself I feel like being in a sci-fi movie.
I need to make a little video to show how this works. As soon as I receive my white ABS and I can print the rest of the covers.
Update 21/09/12: Assembly instructions uploaded in Tab "Assembly help" .
Update 01/10/12: Assembly sketchs uploaded in Tab "Assemblysketchs".