I have modified quite a few things on the hand,
and so I had to print it all over again with a new forarm. What is very
different, is the lining which is much, much more easy than before.
How many times was I asked about the connections I made from the servos to the Arduino… I decided to upload once and for all the way I did it, even if it is not very contionnal.
You will find the instructions in the Assembly/Other Tutorials tab under: Creating the connectors
I'm going to post this as is, I'm running out of
time and there is too much things going on. If I don't keep up I feel
like I will be submerged. So, this post is not really arranged but at least it's posted. Funny how french people made me talk! In Roma, I barely had to speak and would operate the robot almost the whole day long. In London I had to talk a lot to explain the project and I would operate the robot as well. In Paris, I just talked and explain everything over and over and barely could operate the robot. At the end of the day we were washed out! The
french would approach us with caution, but once they understood we were
not selling anything, the barrier was down and they were very, very
enthusiast. We got good contacts and there is good chance it will bring
more involvement in the near future. We tried to make pictures but
somehow the light with our camera was all dark and yellow, very
disappointing, there wasn't any natural light in the show room. So I
will only post others videos and pictures here. Here is a video
done by Russian people in visit in Paris, I feel like I gave the ball to
the robot a thousand times, during these shows, it is time he learns
other tricks and stuff. :)
London 3D Print Show was very interesting. It was a 3 days
event, so plenty of time to demonstrate, meet people, talk a lot, to the
point that my voice started to change at some point. And the
robot didn't brake any printed part, but I burned 2 servos. The reason,
in the right arm I'm still using the first version for to attach the
servos, and the wires got tangled between themselves and caused an
overstress. Smoke came out of the arm + an awfull smell, very easy to
recognize. Unfortunatly I had no more spare servos because I had
used them for to demonstrate the Leap Motion in another printed arm.
(see video)
InMoov will be presented for the 3D Print Show in London and Paris. London 7-9 november, Business Design Center Paris 15-16 november, Carrousel du Louvres.
I do keep myself busy lately... A bit too much in fact.
Make
is organising a big robot hack and InMoov is involved. There should be a
bunch of hangout sessions. This is going to be fun!! Chuck Fletcher,
who presented his robot InMoov to the New York MakerFaire is going to be
part of the sessions as well.
Here is the link to the article.
Okay, as I said before to go to Roma, parts for the rest of the Torso are ready for download. This includes the surroundings of the kinect and it's casing. You will need a whole bunch of parts which are added to thetorso CubeHerodownloads.
Four days of geekiness with Makers from all over Europe! It all went very smooth, no problems with the flights and InMoov arrived safely. No broken jaw or shoulder. It was pretty intensive, but what a great time. I meet Leonardo (who's made this website) and Alessandro (Ambassador of MyRobotLab), and we shared some unforgetable moments.
Wow this is it! Tomorrow we are going to Roma to present Inmoov at the Europeen Makerfaire. I'm pretty excited, hopefully everything will go smoothly, starting with douanes and the airports.
3D printing is a major concern for the authorities since some fools printed guns, now any printed stuff can be potentially a weapon. Since you could print a Makerbot rabbit that works as a gun, who knows what form a gun could take. Anyway, I really wonder how this is going to be evaluated by the "douanes".
As you know Inmoov is filled with cables, motors and batteries.
Hopefully when they open my suitcase they will see a robot and not something else. How does this looks to you?
Thanks to Leonardo, we have a superb website which will let us get more features then the blog. Leonardo,
an Italian InMoov builder in his spare time, and a great musician, has
been working since june to get this up, it has been a long task because
every pictures, every tutorials, every posts had to be copied or linked
to the site. He has created a set of tabs with more functions and sub-tabs. A new look to get easier access to whatever you look for. One
of the main reason for to move to a site was a to be able to upload
builders creations. For that we needed space on servers allowing us to
store data. Leonardo is also going to the Makerfaire in Roma with me and he has uploaded his videos and pictures of his InMoov. So make sure to check the Community tab and start to upload your creativity.
I
will be closing the tabs of the blog when I'm sure everything works on
the Website correctly, there is no point to keep everything double.
I was away for a while, and of course when I travel, I don't cary my 3D printer with me. Plus, being away in the desert makes it difficult to comuunicate with internet. Since I released the finger prosthetic for Bionico, I was impatient to print it. Fortunatly Morris, on the other side of the Atlantic had his printer ready for testing. He was the first one to print the finger and got me some feedback. You can see his blog here So I was designing on my computer in the desert and he was printing the parts along, and everytime some thing was not correct in my design, he would notify me and I could check the pictures posted on his blog to modify the design in consequences. This took us a lot of time after all. But we got to move on and thanks a lot to him. The three bellow pictures are from his blog:
Being back from the desert, I was then able to print the finger. There was still things that were not correct. I also ordered another type of motor which is a 6V planetary gear motor with a ration of 154:1 from Pololu. So the casing had to be redesigned again. There is a very small worm gear that actuate the finger and I printed it in ABS but it is definitly too fragile, so it either needs to be modified or printed in stainless steel. You can get it by Shapeways here.
I left both versions on Thingiverse because it can be handy for other projects.
With the servo Corona DS238HV use these files:
-FingerWormV1.stl
-ServoHolderV2.stl
-PhalangeV6.stl
-ActuatorsV3.stl With the planetary gear motor use these files:
-FingerWormV2.stl
-MotorHolderV3mid.stl
-MotorHolderV3top.stl
-PhalangeV6.stl
-ActuatorsV3.stl
It was pretty hard to make that video, because the small wormgear breaks when the finger reach the end of it's run. Unfortunatly I haven't yet figured out how to set a time delay on my script and a reverse of polarity. Using DC motors and servos is not the same when it comes to create a script in the Arduino. The big news:
InMoov is selected and invited for the European Makerfaire Edition in Roma. So I will be going to Italy and have the pleasure to meet all the italian and european geeks that attend this event. I hope to get some time to make the robot usable, it's going to be something to put the full InMoov in a suitcase. Myrobotlab is also selected to attend the Makerfaire, Alessandro will be the Ambassador of MRL. Leonardo who has created a superheroe InMoov will attend the faire as well, hopefully his suitcase is big enough for to bring his robot. Leonardo his also working to make us a real website. And Bionico, of course, is also selected for the Makerfaire, we are currently getting a hand ready for Nicolas. Hugues is hard at work on all the stage levels. Here is a french article about us in LE MONDE newspaper.
Mmmh, Since InMoov hand has been released on Thingiverse in 2012, I received demands on
how to use it as a prosthetic. I was always a bit skeptical about it. I knew the initial design was not
really adapted for that matter and I think it could be better done if I kept
the prosthetic perspective in mind. Lately a french FabLab of Rennes asked me if they
could use InMoov for their project. So, I have been working on this for about three full days. I had made a first design very simple to see if it could actually work. I presented it in Rennes for the Bionico project. The idea is to get a finger that gets actuated mechanically instead of using braid lines to pull the fingers.
It may look similar, but I tell you, it isn't. This little baby really took me a hell of a time to design. When things are small, you need to take a lot in consideration with our 3D printers. First, all parts should be printable without or almost without support, the thickness of the walls have to be thick enough to be printed with a reasonable definition. Parts should be easy to assemble. And last, parts shouldn't require too much quality from our printers...
I know this is not the legs... Many of you are waiting to see what's next to download for your robot. But this is important, if it can help disabled people, it is urgent. You can download this prototype here. Remember this hasn't been printed yet and may have problems that I still need to resolve. It is uploaded for the FabLab of Rennes to check movements and frictions under Freecad. This could, if it has enough strength under load, replace the hands of InMoov later on. It is meant to work with a Corona DS238HV servo. Also Leonardo and I have been setting up a website for InMoov, it isn't ready yet, but things are coming. Leonardo has been working hard on it, and I have been asking for to modify things, so poor Leonardo is under load. Also I want to thanks the donators, for their generosity. It will help us to keep the site up. Jha has made a new script for mouth movement and Grog has been working to add it in the InMoov service. I still need to test that to see how that works, but if it's good, InMoov should be able to move his jaw everytime he says something. Cool! The legs... That's what I'm going to focuse on now. Remember I had made the foot. This foot needs work and I need to redesign the ankle because I want to add a servo to get more DOF. So that's the next goal. I have worked on the Knee but it is not clear yet how I want to actuate it. So much work for so little time.
Rennes, was the city of my
grandparents. It was a long time since I wanted to go and visit this city, but somehow never got the occasion. It is definitly a city worth more than a two days visit. I found it very charming, these little streets become very full of life. On sunday morning it is very quiet and empty.
A few weeks ago I was contacted by a
Nicolas Huchet, Bionico who was interested in developing a prosthetic hand
based on InMoov.
I had been already asked for a few other projects of
this sort, but was a bit reluctant to go along. The main reason is
because InMoov isn't conceived to be such device and could be a disappointment instead of something really helpful. It's all plastic,
even if ABS can be used in many devices, once 3d printed it isn't has
resistant as when it is injected. Also depending on how the hand is built and printed, the final product can be good or a bad.
I did explain most of my reluctance to him, but still he was ready to go on with the project.
Following this I got contacted by
the LabFab of Rennes. As you maybe saw on youtube there is a InMoov
builder, called Brancante, who's been very involved into testing a
prosthetic with InMoov.
Putting them in contact was a logic
thing, and of course they shared their different results.
Region Bretagne organized this week-end
a big event pretty much like a MakerFaire. Imagine, Construis. Since
Nicolas Huchet was going to present his Open Source prosthetic
project during this event, Hugues du FabLab invited me to join them
for two days to present and work with them.
It was very interesting, I got to meet
a lot of people, some part of the projectand some others just
discovering it. During the event I did my first Round table based on
the OpenHardware subject in company of Nicolas Huchet. Other guests
were there, SnootLab, Mutable, John Lejeune, Jimmy P Rodgers.
Being most of the time a bear in it's
cave this was an interesting shot. Talking in a microphone to an
assembly of people is something. I guess with practice it becomes
easier with time.
Hughes had been, during the previous
days, working on a first prototype which was a real DIY hand with
cables and wires. I think somehow it made it even more interesting to
people because of it's intriguing appearance. Anyway the prosthetic was wired
with myo electric sensors, and we got to test it on Nicolas. And it
worked !
Of course the open close pattern
movement was very simple and was working with a bit of latency.
Nylon threads used by Hugues were
streatchable and thin, which didn't allow any grabing of things, but
think of it. The InMoov hand was printed in a few hours, then servos
were added with cables and then all wired to the Arduino with sensors
and that's it.
I think if we work and develloppe the
concept and design we can get a working Open source devise pretty
fast, and transformable to particular needs. Don't misunderstand me,
it's not going to be as good as the ILimb, but it can be very
helpfull for those who can't afford to pay 25 000 euros for a
prosthetic. The Makerfaire Tour bus was in Rennes for the occasion, they did an interview about the project.
Since the Nederlands I hadn't posted
anything on my blog, because of a lack of time, but there has been a
lot of things going on around InMoov though.
The major one, is the implementation of
the i2C board in MyrobotLab by Grog. This is a major advancement
because now I can hook up 16 extra servos per i2C board added to the
Arduino.
So that means the eyes servos but also
the jaw, and next the dorsale, hips, legs, feet.
It has been a 100% worky on the first
test, Grog couldn't believe it
Then another test we did with Grog and
Alessandruino was to test remote controlling the robot through the
internet. Imagine this, Grog being in the US took control of the
InMoov gestures in my workshop in Paris France. Totally amazing to
see !!
We tried the same thing wth
Alessandruino but somehow it didn't work. I think we had too many
video instances working at the same time.
Next innovation, Jha in Australia has
been working on a script to make the jaw work as the robot speaks.
That's also cool ! Just uploading the python script into MRL and
the robots could repeat the prewrote sentence and having is jaw
working in accordance. It isn't perfect if you really focuse on the
jaw, but once you get other body movements at the same time it is
interesting. Some might see this as a bit uncanney. The script is
available on MRL and I will make it available on the download tab.
Another new and interesting happening
is, Leonardo from Italy who has been printing a super heroe InMoov :)
He has proposed to work on the transfer of the blog data to a real
site, so for that matter I bought the domain name: InMoov.fr Thanks to donators we will be able to host the site and create something more conventional for us.
What a day! Yes I was there and I saw all those Ultimakers printers running against the clock. Protospace and Ground3D had organized the Worldrecord of 3D printers in a
pretty short time and I was surprised so many people came to
participate and watch the event. It is very interesting to see a community of people working all together for one purpose. I got to meet a lot of people and I really enjoyed my afternoon. I have to tell you that at the end of the day, I couldn't talk anymore. My vocal chords had been pushed to the edge. There was a good band playing music in the printing space and you had to talk pretty loud to make yourself understand. The robot didn't get built though, two hands and two heads were ready. Many parts of the torso were done but didn't get assembled because of lack of time. They were lacking of makers and tools. Plus, it was a windy day and the printing space was open to the outside, and as you maybe know printers don't like fresh wind. So there has been many parts that didn't turn out correctly because of that. Then through confusion of reprinting, some parts have been printed more times than necessary and some others not at all. But somehow it doesn't matter, at least it HAPPENED and it was fun, because people were having a good time. A Dutch article about the event with an interview. Here are some pictures of the event: Pictures credit: Ground3D
The Event seen from the road
The installation
Before the opening
Protospace staff organizing the files during the afternoon.
You can see on the table the printed parts.
Here I am discovering all of what had been done by the staff of Protospace.
People are studying the printed parts from a new born 3D printer.
Bram trying to look like InMoov.
There was even a Rostock Ultimaker style 3D printer
This part is ruined by the wind coming from the open door.
As you can see InMoov was going to be very colorful.
WormGear being printed without support, I was surprised how well it turned out.
This has nothing to do with the event but I had to put it on the blog. It was at the Makerfaire of Taiwan 2013. Credits for the video to 3D Maker. I just can't stop looking at the face of the kid when he realize it is the glove that controls the hand. Great moment!
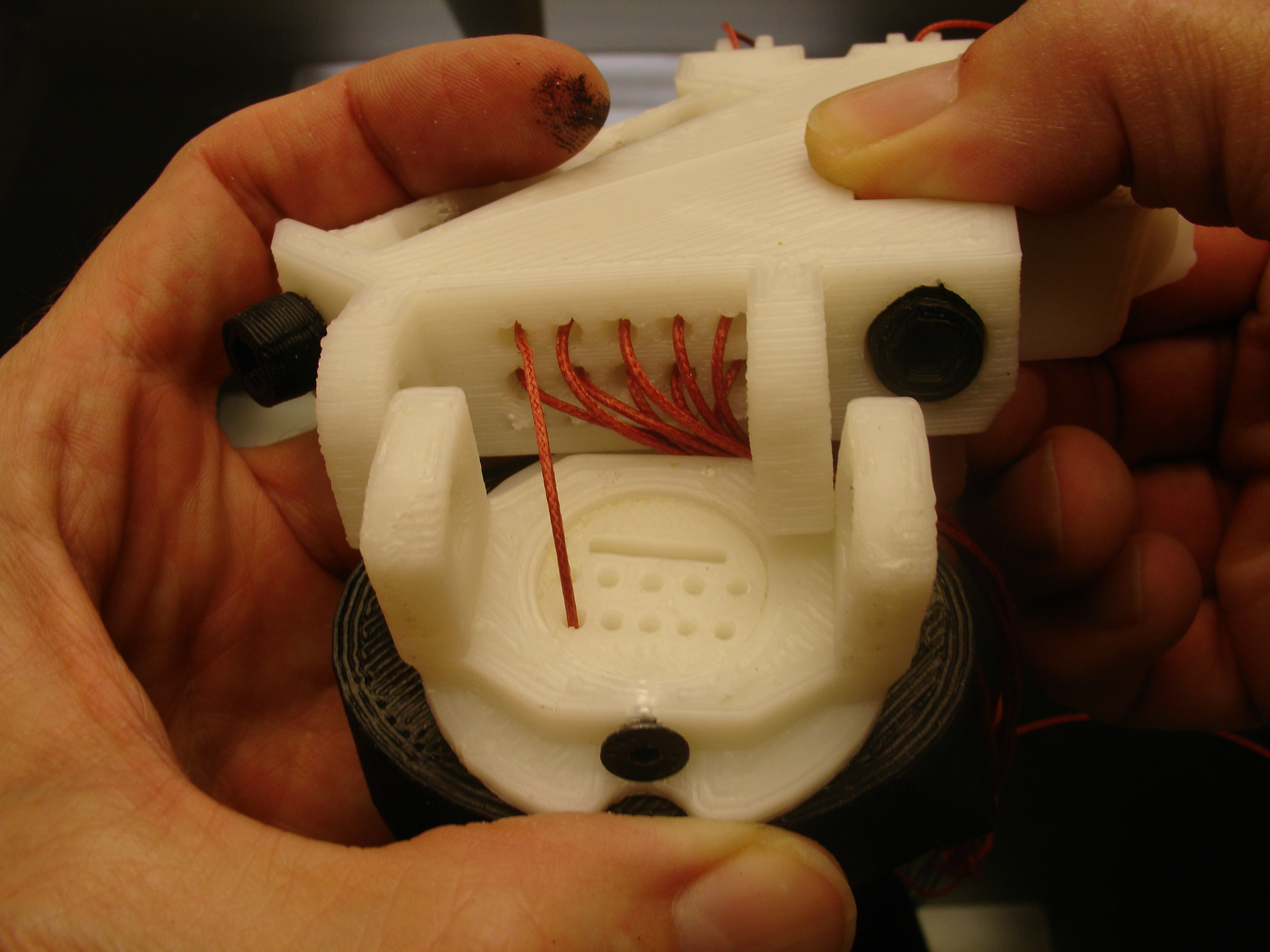
Okay here are the ears. These ears are for the look, they actually don't really have a function. They were initially designed to act like a circus in which the microphone was inserted, but the servos are making a lot of noise and I haven't found a simple solution for to get these ears to listen well.
If one of you can put some microphones in there and get good results, let us know on the forum, it would be nice. I can always redesign something for it.
Just, one day! Can you imagine fifty 3D printers working at the same time to produce InMoov in one day. Builders actively organizing the files to be printed, Hackers getting the parts ready and preparing the program in one day. The result should be a World Record Event (according to Ground3D) which will take place on the 25 of may in Utrecht in the Nederlands. This is an event organised by the Protospace Fablab in Holland. If you can read dutch this is for you: LINK. If you can't read dutch, use the Google translator.
This is very exciting! I have been contacted by Ground3D which has been printing InMoov parts since a while. When they first contacted me I wasn't abble to pick up the phone so my wife did. They must have been surprised to get someone who could converse with them in dutch. (She is from Holland) So the plan is to dispatch all the files on 50 different printers, it is possible that some very long printing parts will be started the previous day. (Just in case) They seem to know a bunch of hackers, which will prepare and assemble the parts once they are printed. Some other hackers will organize all the wiring and programms. We still need to see if they plan on using MRL and Arduinos, but I really hope so because it is part of the force of InMoov. I will let you know more when I get more info. I will certainly try to attend this event although it isn't that close by. I wonder why this just doesn't happen here in Paris, it would be so much easier... In France, there is a blob in Science & Vie junior in the 284 issue.
Apparently, it leaded them to make a full article about robots in the next issue (285). She looks like InMoov's wife..
In the meantime during the nights, I keep on working. It's been a while that I want to test a finger sensor. J Ha, an Australian InMoov builder, has been busy making some sensors for the hand, his last video is very interesting because he has done a mechanism where the whole servo moves according to the pressure. J Ha also has printed almost the whole robot, so according to him, he will soon let us know how he did this sensor mechanism. I had found on the Instructables a very simple and cheap way to create sensors, so cheap that I had to try it. So I got myself some of that antistatic foam used to protect circuits from shorting. A board of 40cm X 25cm X 0.5cm cost 3 euros. I have cut two disks of copper in the diameter of the finger and another disk in the foam. The copper I had it laying around my workshop, aluminium foil can be used as well.
I ran two very thin wires through the hinges up to the tip of the finger, soldered them to the copper disks, if you use aluminium foil you won't be able to solder it. Then I sandwiched the foam between the copper disks. Using a two component epoxy glue on the outside of the disks, I managed to glue it all together preserving the spongious effect of the foam.
Writing a script in the Arduino.exe took me a lot of time, that's why I got to bed only at 4 AM. All the scripts I would find on the net were about how to make a servo move when triggering a pressure sensor. But my goal was different, I want the servo to stop moving when the sensor gets a certain amount of pressure, plus I wanted to be able to visualize how reactif was my DIY sensor, to make the servo act in accordance. Another problem I had with the script was to slow down the servo during it's movements to get relevants values out of the sensor. If the finger goes very fast and hits the objet strongly isn't the same factor is if it encounter the object softly. The script is still not correct but I got to see what I wanted. I also used the Oscope in MRL to see what curves it would produce and what was the minimum and maximum values.
The result of the Oscope, here, shows a min value of 0 and a max of 347 which seems pretty good to me. This was obtained by pressing firmly and releasing the finger tip. I had never used the Oscope of MRL and it is a fine piece of the software which can be very handy. Bellow is a little video done at the request of Grog, because this way he can maybe integrate and adapt the script in the InMoov Service with Python.
Now, I have ordered some QTC pills sensors which are ridiculously cheap and will modify the finger tip to improve the pressure impact direction. Users will be able to just remove the finger tips already printed and add that modified finger tip to simply benefit of a pretty effective sensor. The other night I was for the second time testing the recently rebuilt tracking service in MRL and somehow I got to burn my second Hitec HS805BB. According to Grog I shouldn't test it anymore until something is fixed in the service. I guess I will listen to his advise. The servo goes beyond it's range for some reason. Expensive tests...30 euros to the trash. Replacing the RotHead servo in the head gave an odd and creepy feeling in the worshop the other night...
Working with the InMoov tracking service in MRL showed some limits. The movements of the head up and down limits the range view of the robot. Since the cameras I used aren't wide angle lens and if I would add another lens, the tracking would get confused because of distortionned images. That's what I understood from different posts on the forum, so I did'nt buy a wide angle lens to try. Now the option was to build a mechanism for the eyes. In earlier post I had discribed it, but couldn't upload it on Thingiverse because of servo failure which resumed my test to a few minutes of movements.
Since then I was waiting for some other servos, some DS929HV from HobbyKing, which finally arrived. After a few test the mechanism had to be reviewed again. Somehow the eyes would get stuck upwards, the skull had a thickness that had to be modified before it's release.
Now the mechanism seems to fonction properly. It isn't very strong and not really easy to hook up in the head, but since I want to go on with the legs, I will release it, as is. Hopefully some of you will make more performant derivatives on Thingiverse.
The tracking service integrated in InMoov is under work by Grog on MRL at the moment, so I can't really make more test with that. Plus, I have bought two Adafruit 16 chanel boards for to extend the servo number capacities of my two Arduino.
I did some simple test with the Adafruit boards using the Arduino library and it works. Now Grog needs to add on his working list, the implementation of this two boards in the service... I don't know when he is going to find time for that.
The goal is to create a tracking service which will benefit of four actuators, two for the head movement and two for the eyes. It's like adding a pan/tilt mechanism in another pan/tilt...According to Grog and Alessandruino (A friendly participant of MRL which is of great advise) it is faisible.
Below is a video of the tracking recorded through the camera of InMoov.
the video is slow and corrupt because the codec encoder I choosed in MRL
OpenCV wasn't the right one. So I can't cut uninteresting parts and
also can't speed it up. If you really have time to loose, you will see
the InMoov's hand showing the teddy bear to the tracking, after that I
give voice commands (which aren't recorded), the tracking head moves
accordingly to the tracking set point. When the hand reaches the bottom
of the screen, this is the limit of the head movement. I did try a few
times with the same voice commands "one", "two", etc like seen in
previous videos without succes. Of course I could modify the gestures to
stay in the view range of the tracking but it is too limited. Now
adding the movements of the eyes to this, hopefully I will gain in view
range.
Again nothing much happens in this video, so if you really have time to loose, go ahead
Okay you will find the eye mechanism Here.
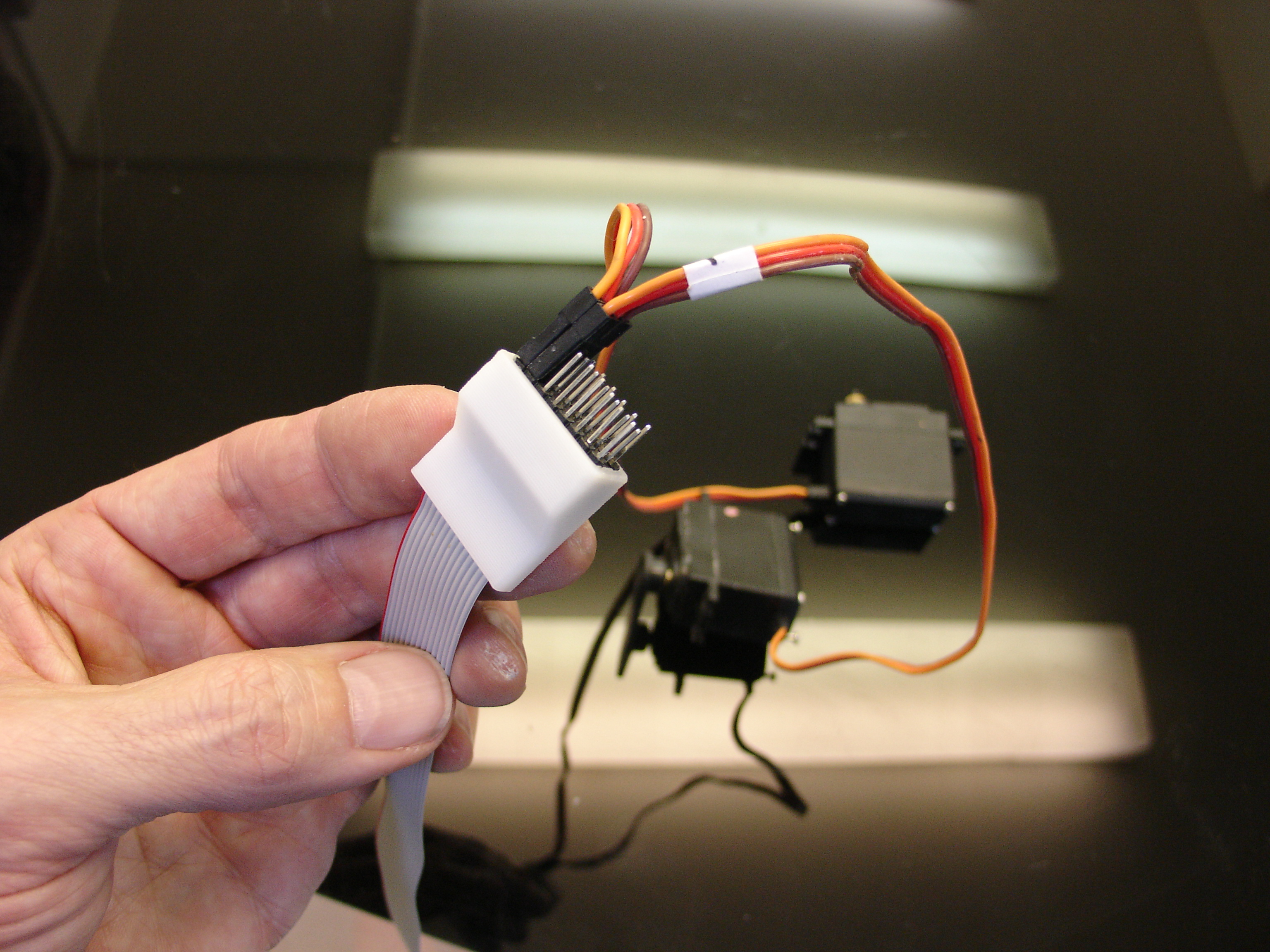
I have done pictures of the assembly and need to make the tuto. The connections to the Adafruit board still needs to be done, so no details about that.
Concerning the ears. I haven't solved the noise problem coming from the servos interfering with voice command, so instead of loosing time on that, I got myself a Bluetooth head set with microphone which let me give the commands pretty safely. This is what I got: Logiteck 981-000382 Wireless Headset..
So at the moment the ears are just for the look, I will upload them as well. If you find a way to use microphone in there, please let us know on the forum.
The foot and ankle still needs improvements, but all together the principle of double contrary rotational system that I imagined seems to work. The ankle can take any human positions at rather fast speed. How to control it, so it adapts itself to an uneven floor still remains a question though... I need to reinforce someparts because they wouldn't last long with the full robot standing on them.
I designed the foot with a look halfway between a foot and a shoe. The big toe doesn't look anymore like on these photos, it is now, more integrated to the other toes. Also the toes fold more to a 45 degree angle now.
Here are some pics.
Beside the foot which needs to be improved, that meens somehow redesigning some parts, I decided to make myself happy and to enhance the look of InMoov.
The Torso was initially designed to receive a shell for to create a chest and a back. I only worked on the chest for now and reserved a space for to insert the kinect Xbox360. The space reserved should allow other users to insert other brands of Kinect. On the pictures below it doesn't show how it is inserted because it will come right under the printed chest. I still need to print those parts to make sure it all fits together.
Of course I couldn't resist to put the InMoov logo on his chest... These new parts gives him a pretty sturdy figure, I'm happy with the look. That's where my sculptor feelings are the best exhorted.
And this is what I think is pretty cool at the moment. Playing with InMoov seems slow but when I see how difficult programming is, I think they did a fantastic job. Their goal is to present it at the MakerFaire in Taiwan.
Paper Scissor video: